
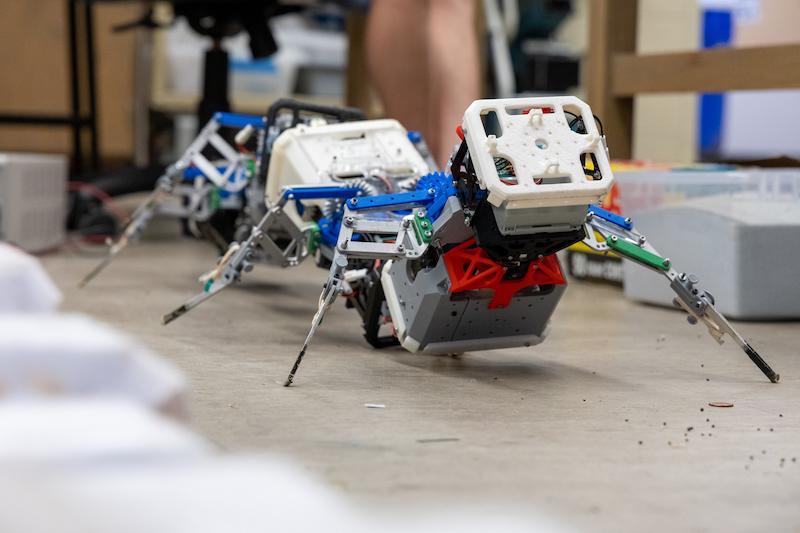
Tým fyziků, inženýrů a matematiků z Georgia Institute of Technology napodobuje pohyby stonožek, aby vyvinul novou teorii vícenohého pohybu. Prostřednictvím svých experimentů vědci zjistili, že roboti s více nohama se mohou pohybovat po nerovném povrchu svižně bez jakékoli další technologie snímání nebo ovládání. Vyplývá to z nedávné tiskové zprávy, kterou instituce zveřejnila.
„Když vidíte pobíhající stonožku, v podstatě vidíte zvíře, které obývá svět, který je velmi odlišný od našeho světa pohybu,“ řekl Daniel Goldman, profesor z fakulty fyziky.
„Našemu pohybu z velké části dominuje setrvačnost. Když švihnu nohou, dostanu se na nohu a pohnu se dopředu. Ale ve světě stonožek, pokud přestanou vrtět částmi těla a končetinami, v podstatě se okamžitě přestanou pohybovat.“
Tým výzkumníků vyvinul teorii, která navrhuje, že přidání párů nohou k robotovi zvýší jeho schopnost pohybovat se robustně po náročných površích – koncept, který nazývají prostorová redundance.
Výsledkem jsou nohy robota, které jsou úspěšné samy o sobě bez potřeby senzorů pro interpretaci prostředí. Pokud jedna noha selže, zbytek ji udržuje v pohybu.
Využití pro pátrání a záchranu
„U pokročilého bipedálního robota je k jeho ovládání v reálném čase obvykle zapotřebí mnoho senzorů,“ řekl Baxi Chong, postdoktorandský výzkumník fyziky.
„Ale v aplikacích, jako je pátrání a záchrana, průzkum Marsu nebo dokonce mikrorobotika, je potřeba řídit robota s omezeným snímáním. Existuje mnoho důvodů pro takovou iniciativu bez senzorů. Senzory mohou být drahé a křehké nebo se prostředí může měnit tak rychle, že neumožňují dostatečnou dobu odezvy senzor-řadič.“

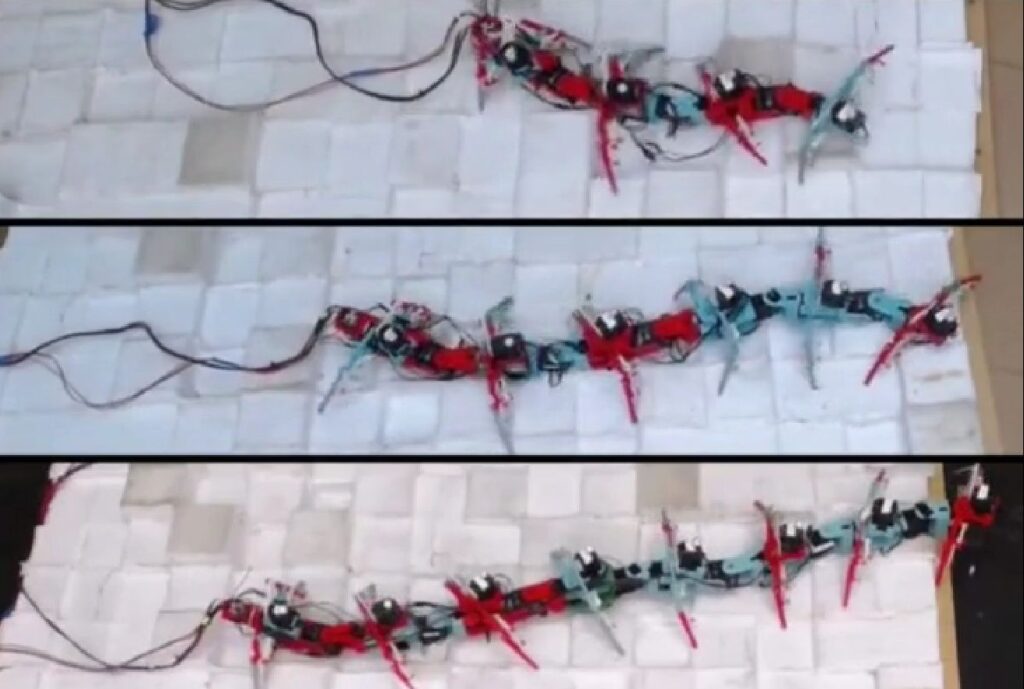
Aby vědci ověřili teorii, postavili divoce nerovný terén a nechali roboty, aby po něm navigovali, přičemž pokaždé zvýšili počet svých nohou o dvě, počínaje šesti a nakonec se rozšířili na 16. Vědci zjistili, že když se počet nohou zvýšil, robot se mohl agilněji pohybovat terénem i bez senzorů.
„Je opravdu působivé být svědkem dovedností vícenohého robota v navigaci jak v laboratorních terénech, tak ve venkovních prostředích,“ řekl Juntao He, Ph.D. student robotiky.
„Zatímco dvounohé a čtyřnohé roboty při překonávání složitého terénu silně spoléhají na senzory, náš vícenohý robot využívá redundanci nohou a může provádět podobné úkoly s ovládáním s otevřenou smyčkou.“
Studie byla zveřejněna v březnu ve Proceedings of the National Academy of Sciences.
Obrázky: Georgia Tech